在北京亦莊舉辦的機器人馬拉松賽事上,一臺人形機器人以驚人的速度完成半程馬拉松,將人類頂尖選手甩在身后。然而,這項突破性成就并未引發廣泛關注——公眾對機器人技術的期待早已超越競技表演,轉而聚焦更務實的場景應用。當榮耀的機器人用50分鐘跑完半馬、宇樹的機器人在春晚舞臺完成高難度武術動作時,輿論場反而響起另一種聲音:這些"炫技"式展示,能否轉化為解決日常瑣事的能力?
自變量機器人公司近日發布的WALL-B模型,正試圖回答這個現實命題。在發布會現場,創始人王潛描繪了一個典型家庭場景:清晨七點,客廳里散落的拖鞋、未清洗的碗碟、被孩子扔在地上的書包,以及貓打翻的水杯——這些動態變化的變量,構成了機器人進入家庭的最大障礙。與傳統工業機器人所處的標準化環境不同,家庭場景的復雜度呈指數級增長:沙發底部的拖鞋可能改變清潔路徑,半懸空的盤子需要物理規律判斷,突發狀況的應對能力成為核心挑戰。
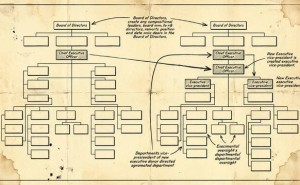
該公司技術團隊指出,現有機器人普遍采用模塊化架構,視覺、語言、動作系統獨立運行,導致信息傳遞損耗與決策延遲。以"拿杯子"任務為例,傳統模型可能識別物體、理解指令、規劃路徑分階段進行,卻無法理解杯子懸空可能墜落的物理風險。WALL-B采用的WUM架構(世界統一模型架構)則嘗試打破這種壁壘,將視覺、觸覺、語言、物理預測等多模態能力整合到單一神經網絡,實現感知與決策的同步進行。
聯合創始人王昊用"統一內存"類比這種創新:當所有傳感器數據在同一個模型中聯合訓練,機器人就能像人類一樣邊觀察邊行動。在演示視頻中,搭載新模型的機器人面對半懸空盤子時,主動將其推回桌面中心——這種基于物理規律的推理能力,使其無需針對每個家庭重新訓練。更關鍵的是,模型具備自我修正機制:任務失敗后會自動調整策略,成功經驗直接寫入系統,形成類似人類學習使用筷子的迭代過程。
數據采集成為突破場景壁壘的關鍵。自變量團隊進入數百個志愿者家庭,記錄不同燈光條件、地面材質、物品擺放方式等變量。王昊坦言,實驗室數據如同"糖水"——純凈但營養單一,真實家庭數據則像"牛奶"——復雜卻富含養分。這種數據采集策略,折射出具身智能行業的新共識:誰能掌握真實場景數據,誰就能構建技術護城河。
35天后,首批搭載WALL-B的機器人將進入用戶家庭,標志著技術從實驗室走向真實場景的轉折點。盡管王潛承認當前產品仍處于"實習生階段"——可能誤將拖鞋放入冰箱、擦桌中途停頓思考——但24小時持續工作的特性,使其能通過日常服務積累經驗。這種"邊服務邊成長"的模式,與軟件產品的迭代邏輯高度相似,只不過載體從代碼變成了實體機器人。
當行業熱衷于制造技術奇點時,自變量的選擇回歸本質:讓機器人先做好家務,再談未來。首批用戶客廳里的真實反饋,或將重新定義人機協作的邊界——畢竟,能收拾一地狼藉的機器人,比跑完馬拉松的機器人更接近生活本質。